


气体驱动是现在软体直线和弯曲致动器中一种常用的驱动方法,包括正压驱动和负压驱动。然而在驱动的过程中,常常伴随着致动器体积的显著膨胀,即使是负压驱动,致动器体积也无明显缩小,此外,传统软体致动器硅胶浇铸的制造方法过程繁琐且耗时较长,这些因素共同制约了基于软体致动器的机器人的多功能性和制造便捷性。
近期,中国科学院苏州医工所研究团队受蜂巢轮廓形状的启发,提出了两种褶皱气动软体致动器(图1),用于直线致动的HLA(Honeycomb-inspired Linear Actuator)和用于弯曲致动的HBA(Honeycomb-inspired Bending Actuator),通过设置一组相同的截面参数并结合应变限制层,同时实现了这两种运动形式致动器的设计。区别于传统的FEA(Fluid elastomer actuation)原理,本研究创新性的将PPAMs(Pleated Pneumatic Artificial Muscles)原理与气动弯曲致动器的设计相结合,通过施加载荷时褶皱的外展内收来产生弯曲致动。对致动器进行了多方面的性能表征,结果显示所提出的弯曲致动器(HBA)在负压载荷的驱动下可以同时实现最大37°的弯曲角度以及78%的体积缩小,并可通过LCD光固化3D打印技术直接一体批量化成型,提高了制造速度并降低了制造复杂性。
团队还提出了一种模块化设计方法,通过与以上致动器相结合,设计了多种不同形式的软体结构,包括S形,Ω形,四爪形,椭球形和马鞍形面结构(图2),仿生手臂结构以及承重桥结构(图3),展示出了极大的结构设计广度。
此外,团队开发了三种机器人系统用于展示致动器的应用以及模块化设计方法的优势。
这项研究工作极大的缩小了气动软体致动器工作时的体积并赋予了机器人系统极高的多功能性,为之后气动软体机器人在狭窄空间中的应用以及功能多样化的提升提供了新的参考范式。
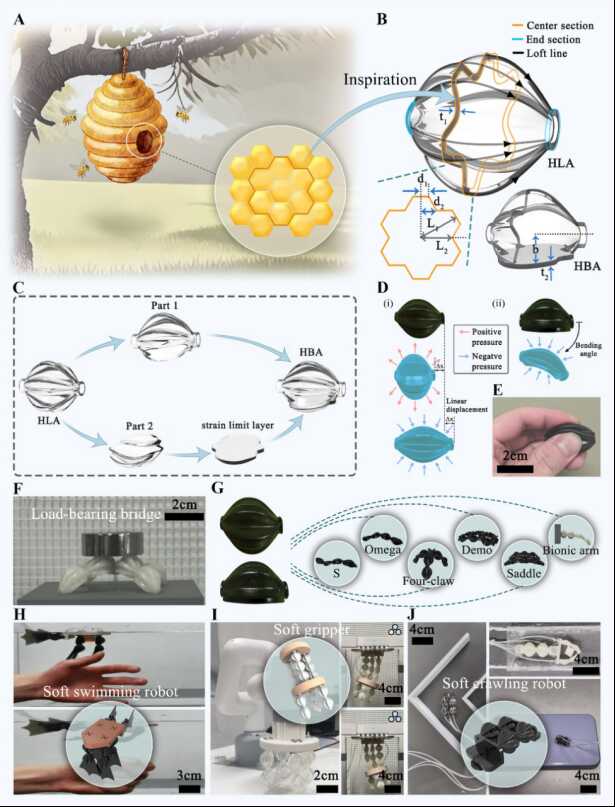
图1.蜂窝启发的线性驱动器(HLA)和弯曲驱动器(HBA)的设计
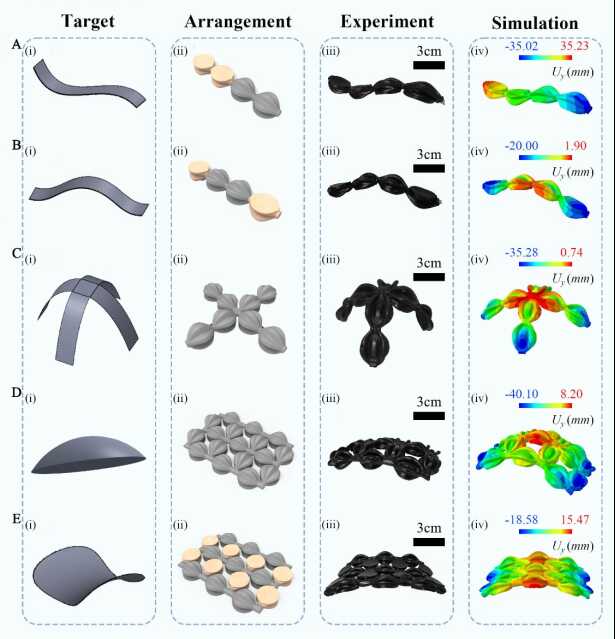
图2.HBA实现的各种结构形状
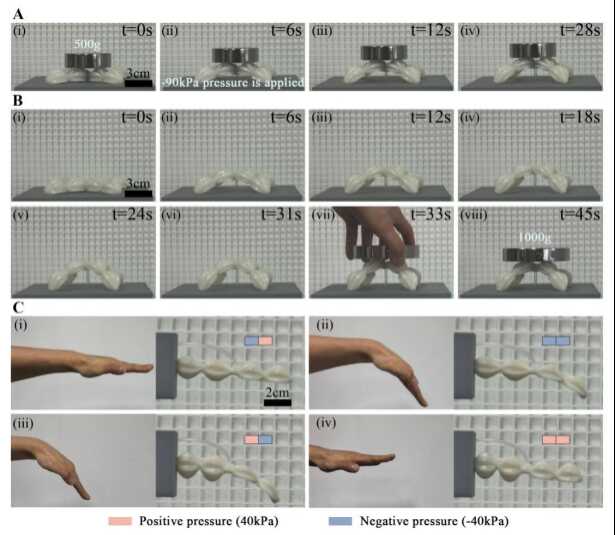
图3. 基于HLA和HBA的结构作为承重桥以及仿生运动的实现
相关研究成果发表在《Advanced Functional Materials》上。该研究得到国家重点研发智能机器人专项项目的支持。
原文链接:https://doi.org/10.1002/adfm.202527277









